![]()
![]() СхемыNEW
СхемыNEW
![]() SERVO
SERVO
![]()
![]() Контроллеры
NEW
Контроллеры
NEW
![]()
Это мои эксперименты с сервомашинкой. Обычно сервомашинка выглядит примерно так:


В сервомашинке положение выходного вала определяется переменным резистором связанным с двигателем через редуктор. Имеющуюся у меня сервомашинку курочить было жалко. Найти неисправную не удалось. Поэтому в качестве сервомашинки использовал переменный резистор с двигателем. Чем не сервомашинка?
У него двухступенчатый червячный редуктор. Для эксперименов оказался даже лучше, чем настоящая сервомашинка. Здесь есть что-то вроде муфты, которая начинает проскальзывать в крайнем положении резистора, а не клинит. В своих запасах нашел плату для управления шаговыми двигателями. Ее и использовал для своих экспериментов.
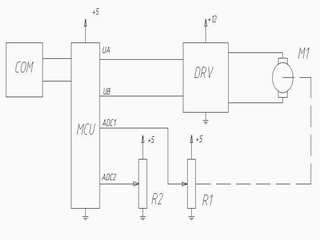
К ней подключил этот резистор с двигателем и еще один переменный резистор для управления вот по такой схеме:
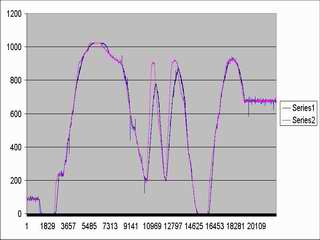
Логика управления проста. Через СОМ порт передается положение сервомашинки (0...1023). Проверяется текущее положение по переменному резистору. Если оно меньше нужного, то двигатель вращаетсяв в одну сторону. Если больше, то в другую. Если соответствует заданному, то стоит на месте. Положение резистора определяетс АЦП в микроконтроллере. АЦП 10битный. Поэтому и такое значение положения 0...1023. Текущее и заданное положение передается по СОМ порту и отображено на картинке:
Красной линией изображено заданное положение, синей - текущее. Видно отклонение текущего положения от заданного. Это связано с медлительностью резистора. Он делает полный оборот примерно за 2сек. при 12В.
Во втором случае положение задается не через СОМ порт,а вторым переменным резистором. Вот график положения:
В результате экспериментов выяснилось, что резистор имеет не линейную характеристику. Это плохо влияет на точность положения. И еще такое простое управление плохо подходит для управления сервомашинки. Двигатель дергается около своего заданного положения, а не стоит как положено. Без ПИД управления здесь не обойтись.
Эксперименты продолжаются...